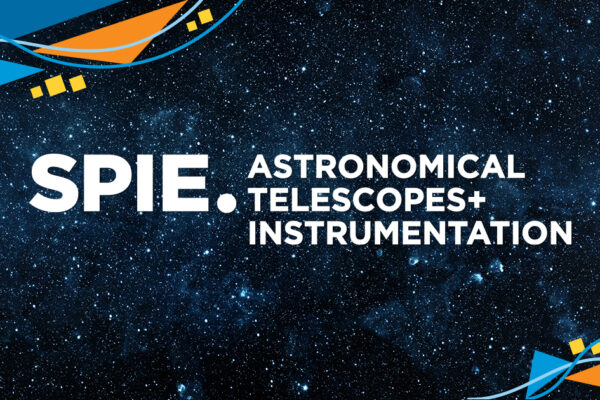
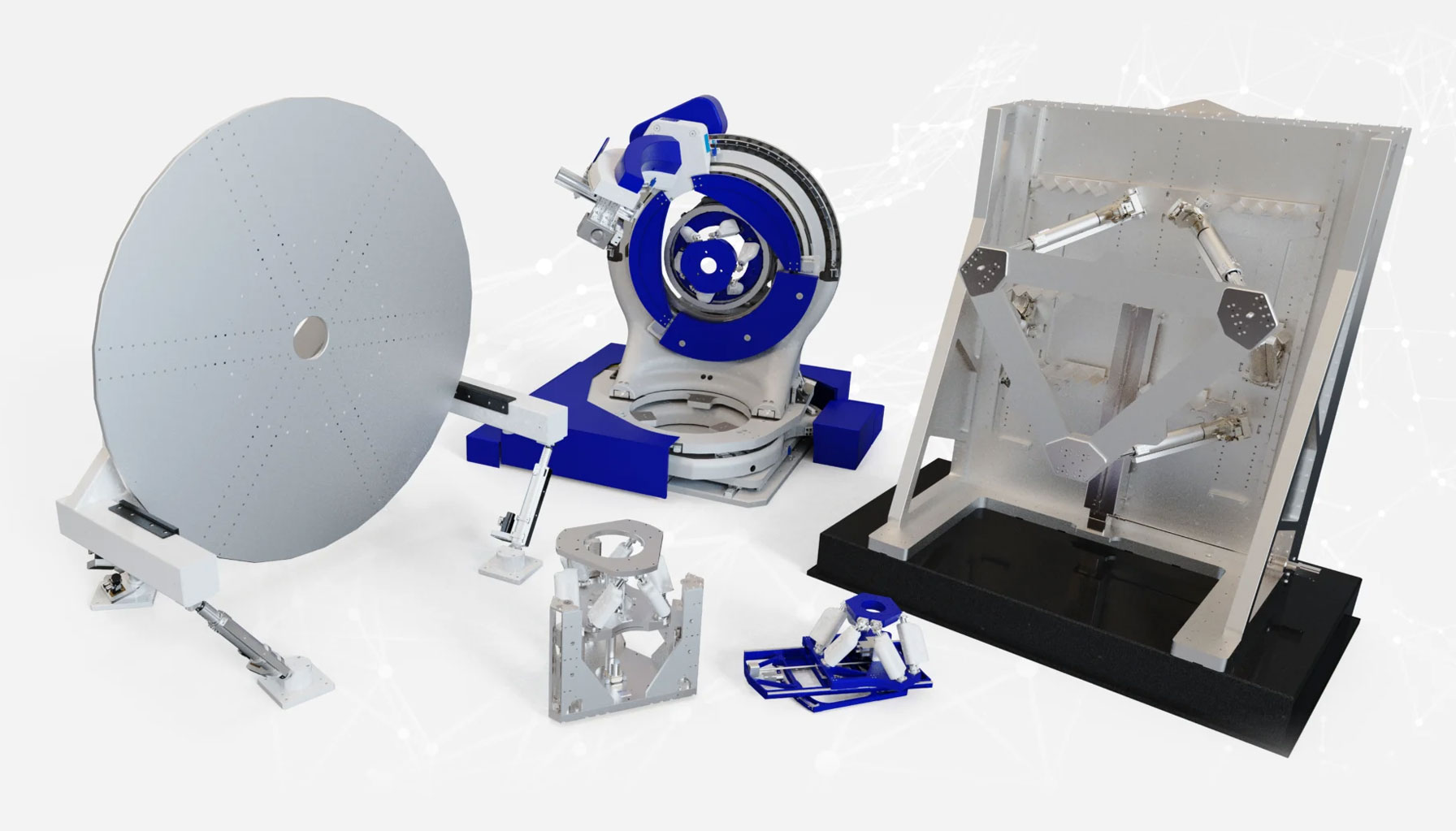
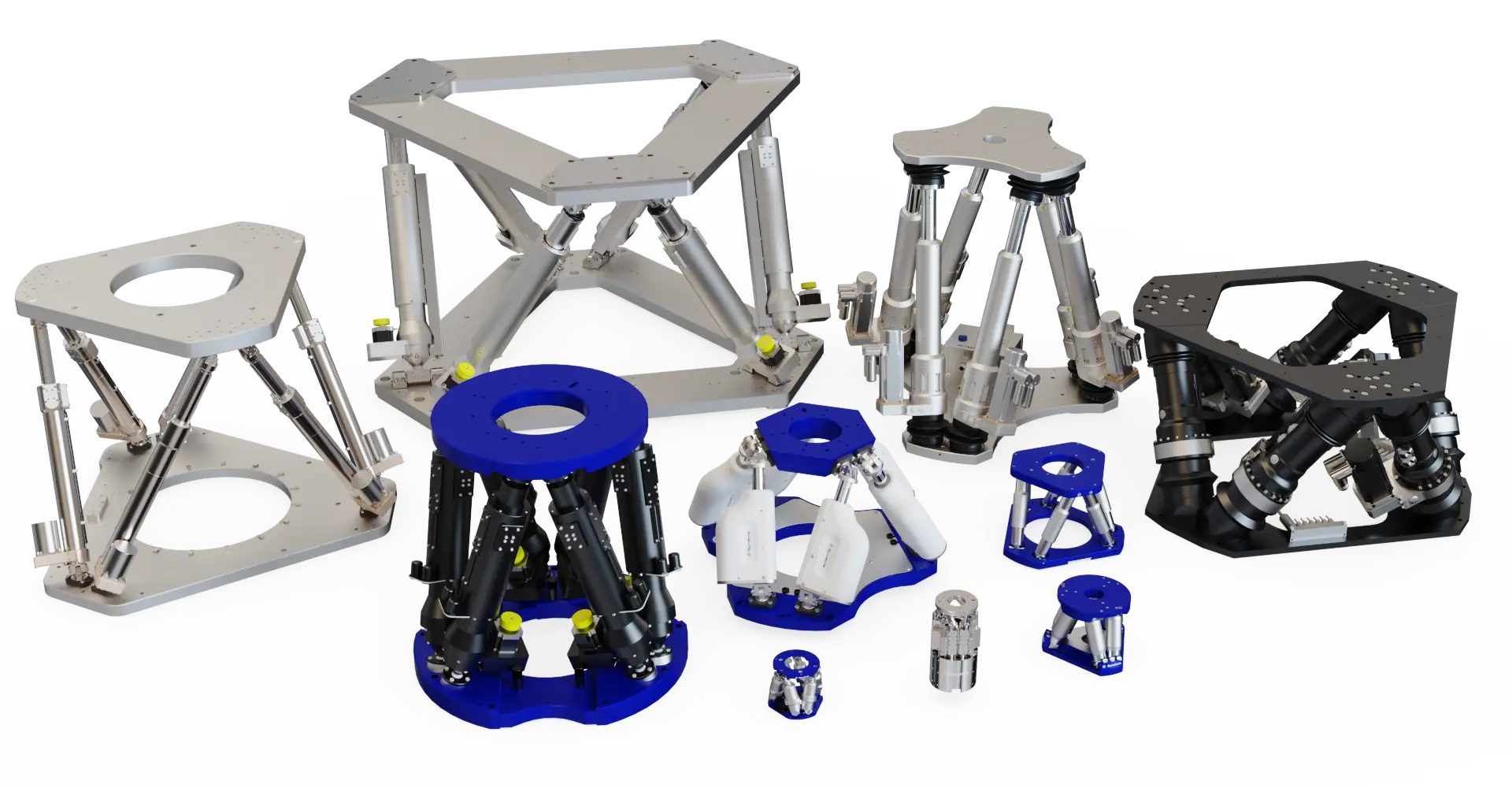
Discover our precision positioning hexapods.
Parallel platforms with 6 degrees of freedom for micrometric positioning of components weighing up to several tons. A technology combining repeatability, resolution, stiffness, speed and robustness, ideal for synchrotron, space, astronomy, optics and research.


Symetrie, experts in precision hexapods for 25 years
Since 2001, Symetrie has been designing and manufacturing hexapods for precision positioning, motion simulation and complex custom systems, meeting the needs of industry and research laboratories. Always striving to improve the performance of our hexapods (also known as Stewart platforms), our engineers work in collaboration with a single objective: to offer you ever more effective solutions.
New hexapod 2025
Discover our wide range of precision positioning hexapods stages for loads from a few grams to several tons and resolutions from 10 nm to a few tenths of a micron.

We help you succeed in your dynamic motion projects, allowing you to test objects weighing from a few kg to several tons with up to 2m/s speed and 1g acceleration.
From the feasibility study to maintenance, Symetrie uses its skills in metrology, dynamics and positioning to offer you the best solutions, adapted to your constraints.
they chose Symétrie hexapods



Our worldwide hexapod distributors

Symetrie

LOCATION OF SYMETRIE HEXAPODS

Our hexapod distributors
Symétrie
1 avenue Philippe Lamour
30230 Bouillargues - FRANCE
Axiom Optics
1035 Cambridge St. Suite 19
Cambridge, MA 02141, USA
+1 (617) 401-2198
Axiom Optics
1035 Cambridge St. Suite 19
Cambridge, MA 02141, USA
+1 (617) 401-2198
Limotion Systems
F644 6F 45, Jojeong-Daero, Hanam-si, Gyeonggi-do, Republic of Korea 12918
Autex
2-12-5, Yotsuya, Shinjukuku,
Tokyo 160-0004
Japan
+81 3 3226 6321
Airboard Technology (S) Pte Ltd
7S, Tuas South Avenue 1,
Seatown Industrial Centre
Singapore 637511
Contact
Geoffrey Giam
+65 91691025
SM Creative Electronics Limited
10, Electronic City, Sector 18
Gurgaon 122015 Haryana
India
+91 124 4909850
ROSH Electroptics LTD
Tom Lantos Blvd 8, 3rd Floor
P.O.B 13833
Natanya 4276000
Israel
Motionsmart Precision Technology Co., Ltd
Building No. 3-3207F, No. 200 Zhangheng Rd.,
Pudong, Shanghai
China 201204
Contact
Richard Shen
+86 21-68370027
Titan Electro-Optics Co. ,Ltd.
14Fl., No. 19-11, San Chung Road
Taipei, 115,
Taiwan, R.O.C.
Contact
Garmar Pan
+886-2-2655 2200 Ext 158